Semantic Segmentation Camera
A camera sensor for getting semantically labelled camera data.
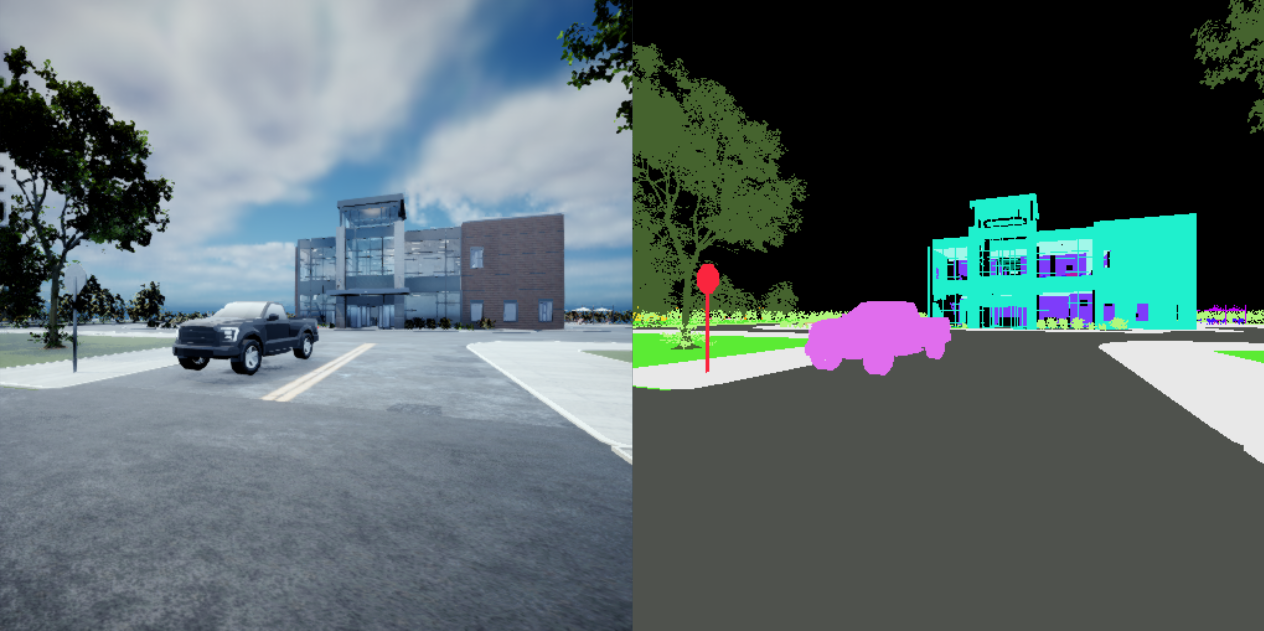
The image below shows the comparison between the RGB camera output with the corresponding semantic segmentation camera output.
See Visualizing Semantic Segmentation Camera Output for an example of how to use this sensor.
Note
All HoloOcean levels already have semantic labels applied. If you are making a custom level, you must enable semantic labels and define any new labels. Please reference Adding Custom Semantic Labels for instructions and our current list of semantic labels.
See SemanticSegmentationCamera for the Python API.
Example sensor definition:
{
"sensor_type": "SemanticSegmentationCamera",
"sensor_name": "SemanticForwardFacingCamera",
"socket": "CameraSocket",
"configuration": {
"CaptureWidth": 512,
"CaptureHeight": 512,
}
}