CougUV
Images
Description
A generic AUV.
See the CougUV.
Control Schemes
- AUV Fins (``0``)
Takes in a 5 length vector. The first element is the right fin angle from -45 to 45 degrees, then top, left, and bottom. The last element is the “thruster” with a value of -100 to 100.
- Custom Dynamics (``1``)
A 6-length floating point vector of linear and angular accelerations in the global frame. This is to be used for implementing custom dynamics. Besides collisions, all other forces and torques - including gravity, buoyancy, and damping - have been disabled in the simulator to allow for a clean slate for custom dynamics.
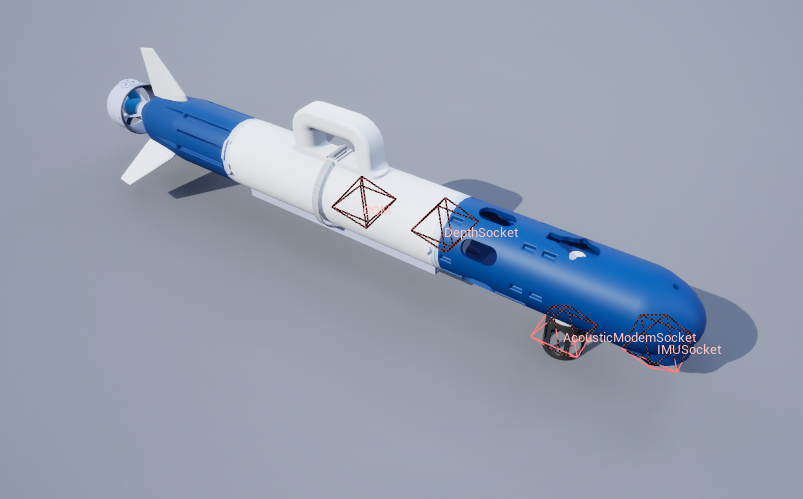
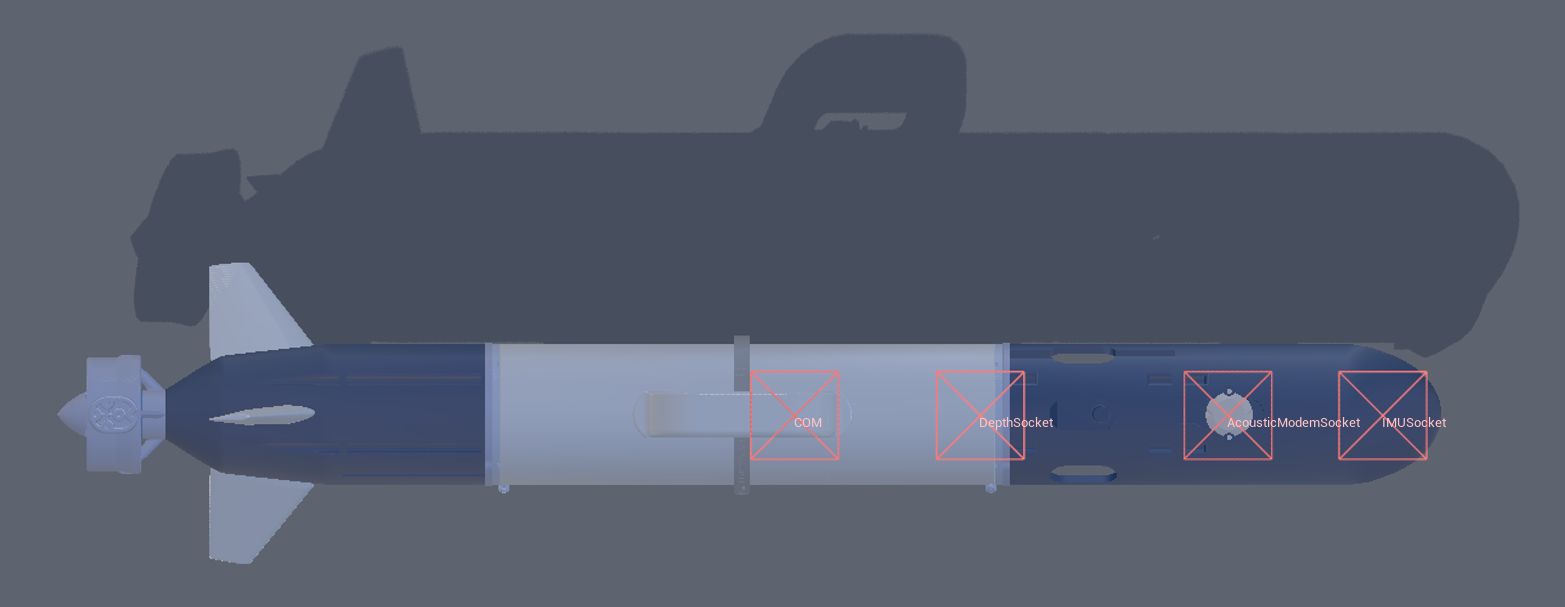
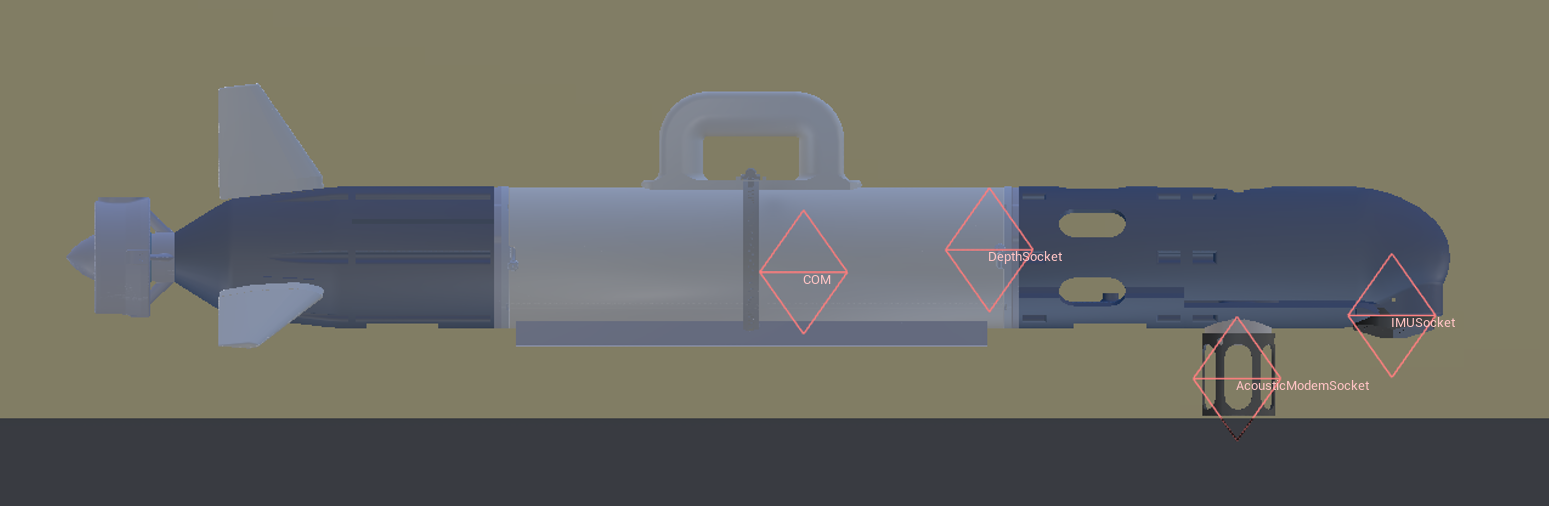
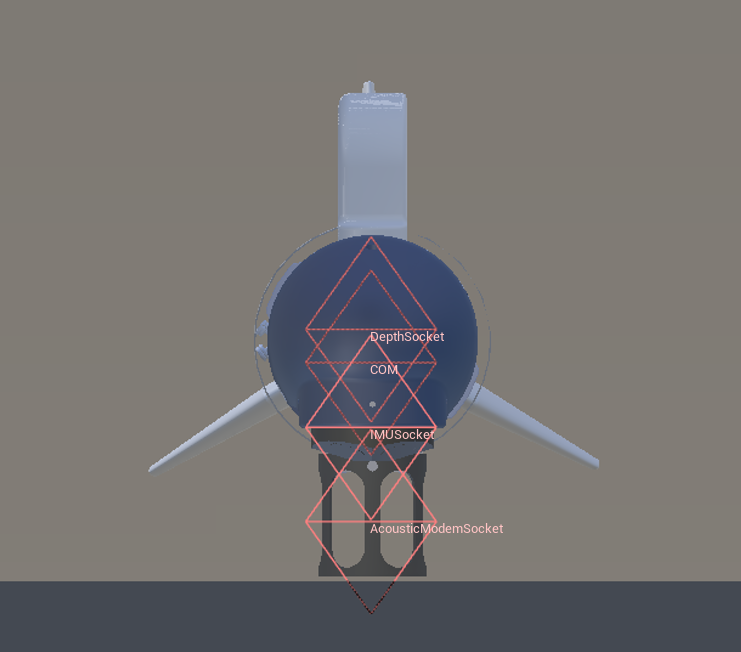
Sockets
COMCenter of mass.DVLSocketLocation of the DVL, same location as IMUSocket.IMUSocketLocation of the IMU.DepthSocketLocation of the depth sensor.AcousticModemSocketLocation of the acoustic modem.Viewportwhere the robot is viewed from.