Range Finder Sensor
The Range Finder is a laser sensor. It returns distances to nearest collisions in the directions specified by the parameters. Or if the sensor does not detect anything whithin the operational range, a negative value is returned. As an example, if an agent had two range sensors at different angles with 24 lasers each, the RangeFinder debug traces would look something like this:
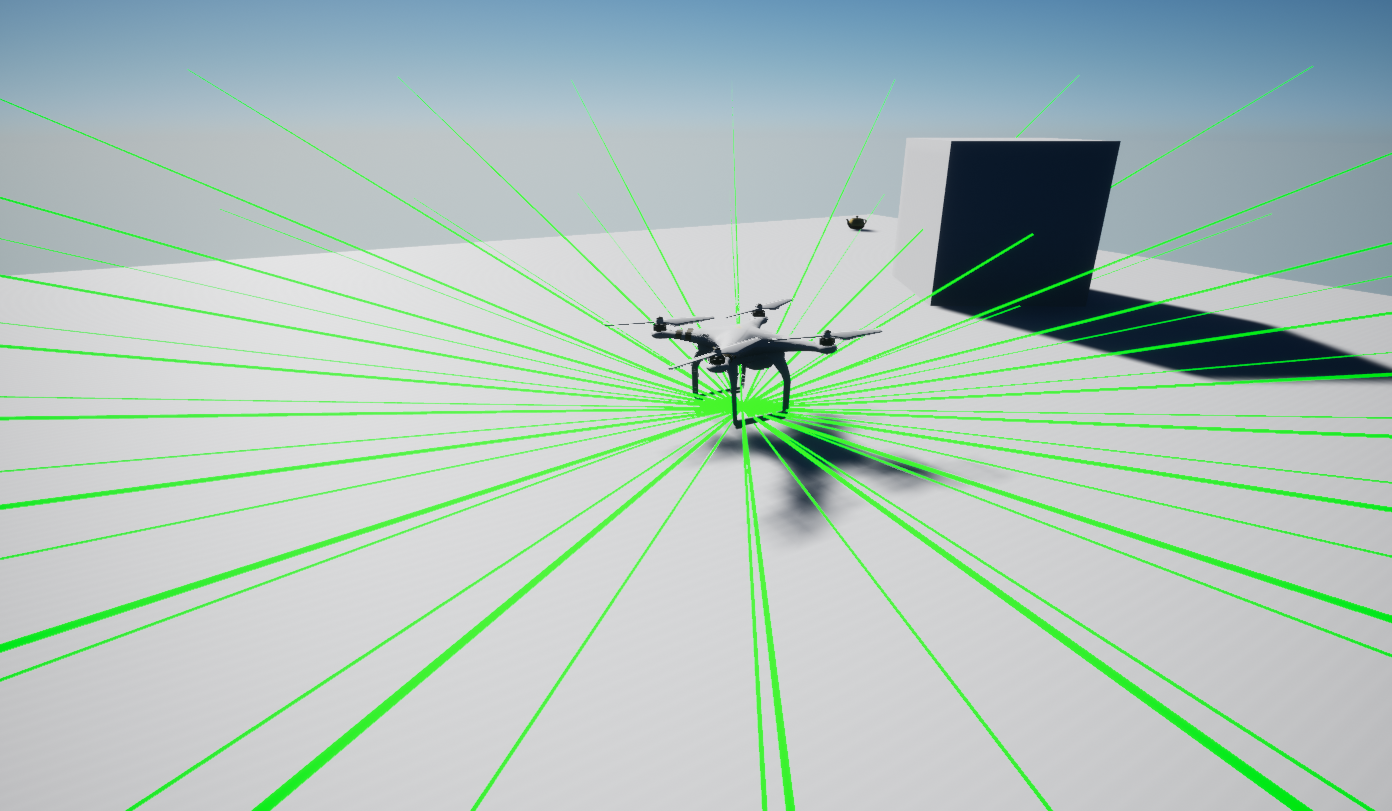
That is, for one laser, you’d have one laser facing forward; for three, you’d have one forward, with the other two distributed evenly along the circle, at 120 degree intervals; and for 24, you’d have a laser spaced every 15 degrees.
See RangeFinderSensor for the Python API and more details.
Example sensor definition:
{
"socket": "COM",
"configuration": {
"LaserMaxDistance": 10,
"LaserCount": 1,
"LaserAngle": 0,
"LaserDebug": false
}
}